





Sensor fusion

Deskripsi Sensor fusion
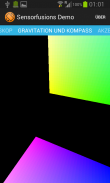
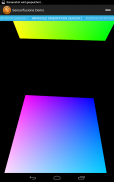
Aplikasi ini menunjukkan kinerja berbagai sensor dan fusi sensor.
Pengukuran dari giroskop, akselerometer, dan kompas digabungkan dalam berbagai cara dan hasilnya divisualisasikan sebagai kompas tiga dimensi yang dapat diputar dengan memutar perangkat.
Hal baru yang besar dalam aplikasi ini adalah perpaduan dua sensor virtual: "Stable Sensor Fusion 1" dan "Stable Sensor Fusion 2" menggunakan Android Rotation Vector dengan sensor giroskop yang dikalibrasi dan mencapai presisi dan daya tanggap yang belum pernah terjadi sebelumnya.
Selain fusi kedua sensor tersebut, ada sensor lain sebagai perbandingan:
- Fusi sensor stabil 1 (fusi sensor AndroidRotation Vector dan giroskop yang dikalibrasi - kurang stabil, tetapi lebih akurat)
- Stable Sensor Fusion 2 (penggabungan sensor Android Rotation Vector dan giroskop yang dikalibrasi - lebih stabil, tetapi kurang akurat)
- Vektor Rotasi Android (Filter Kalman perpaduan akselerometer + giroskop + kompas) - perpaduan terbaik yang pernah ada!
- Giroskop yang dikalibrasi (Hasil lain dari perpaduan filter Kalman dari akselerometer + giroskop + kompas). Hanya memberikan rotasi relatif, oleh karena itu mungkin berbeda dari sensor lainnya.
- Gravitasi + kompas
- Akselerometer + kompas
Kode sumber tersedia untuk umum. Tautannya dapat ditemukan di bagian “Tentang” aplikasi.
Sensor fusion - Versi 2.0.117
(23-06-2024)
Sensor fusion - Informasi APK
Versi APK: 2.0.117Paket: org.hitlabnz.sensor_fusion_demoVersi Terakhir dari Sensor fusion
Versi lain














Aplikasi pada kategori yang sama

Anda juga mungkin suka...
Aplikasi pada kategori yang sama







